
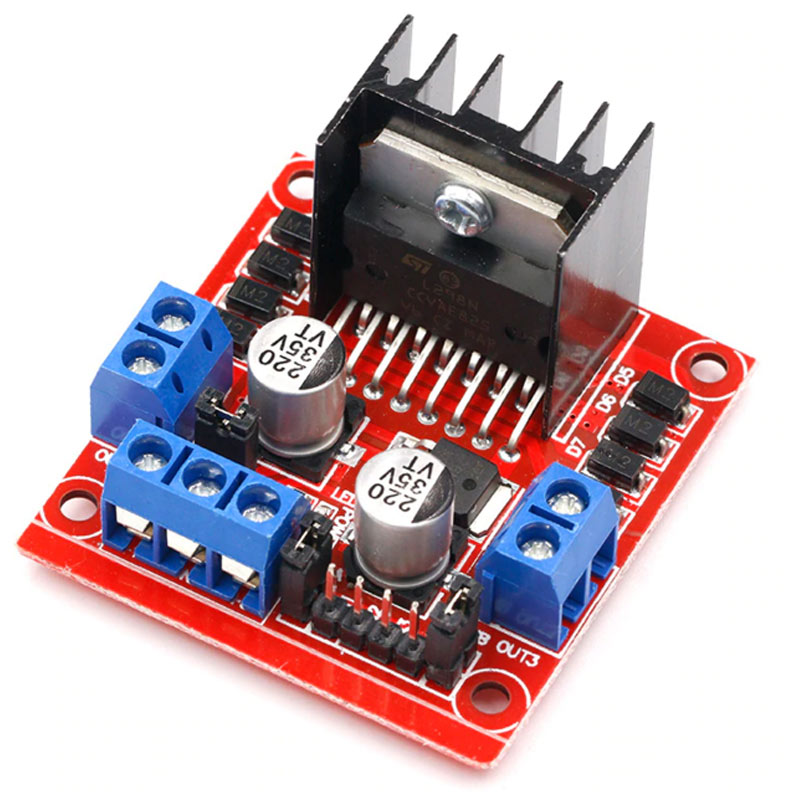


Le module L298N est un module de contrôle de moteur couramment utilisé avec Arduino pour contrôler des moteurs à courant continu (DC) ou des moteurs pas à pas. Il permet de fournir une puissance suffisante et un contrôle précis des moteurs.
Voici les étapes de base pour utiliser le module L298N avec Arduino :
- Connectez les broches d’alimentation du module L298N :
- Connectez la broche VCC du module à la broche 5V de l’Arduino.
- Connectez la broche GND du module à la broche GND de l’Arduino.
- Connectez les broches de contrôle du module L298N :
- Connectez la broche ENA du module à une broche de sortie numérique de l’Arduino (par exemple, broche 9).
- Connectez la broche ENB du module à une autre broche de sortie numérique de l’Arduino (par exemple, broche 10).
- Connectez les broches IN1, IN2, IN3 et IN4 du module L298N à d’autres broches de sortie numériques de l’Arduino (par exemple, broches 2, 3, 4 et 5).
- Connectez les broches de commande des moteurs au module L298N :
- Connectez les broches OUT1 et OUT2 du module à l’un des moteurs.
- Connectez les broches OUT3 et OUT4 du module à un autre moteur.
- Alimentez le module L298N :
- Connectez la borne positive (+) de votre source d’alimentation externe (adaptateur de batterie, par exemple) à la borne “+12V” du module L298N.
- Connectez la borne négative (-) de votre source d’alimentation externe à la borne “GND” du module L298N.
- Programmez l’Arduino :
- Assurez-vous d’avoir installé la bibliothèque “Adafruit Motor Shield” dans votre IDE Arduino.
- Importez la bibliothèque et initialisez le module L298N dans votre code.
- Utilisez les fonctions fournies par la bibliothèque pour contrôler les moteurs connectés au module L298N.
Voici un exemple de code simple pour faire tourner un moteur dans un sens avec le module L298N :
#include <Adafruit_MotorShield.h>
#include <Wire.h>
Adafruit_MotorShield motorShield = Adafruit_MotorShield();
Adafruit_DCMotor *motor = motorShield.getMotor(1); // Utilisez le numéro de moteur correct (1, 2, 3 ou 4)
void setup() {
motorShield.begin();
}
void loop() {
motor->run(FORWARD); // Fait tourner le moteur dans un sens
delay(1000); // Attendre pendant 1 seconde
motor->run(RELEASE); // Arrête le moteur
delay(1000); // Attendre pendant 1 seconde
}
Assurez-vous d’adapter le code en fonction de votre configuration matérielle, du nombre de moteurs utilisés et des broches de contrôle que vous avez connectées à votre Arduino.
N’oubliez pas également de prendre en compte les spécifications électriques de vos moteurs et de fournir une alimentation externe appropriée pour les moteurs via le module L298N, car l’Arduino lui-même ne peut pas fournir suffisamment de puissance pour les moteurs.