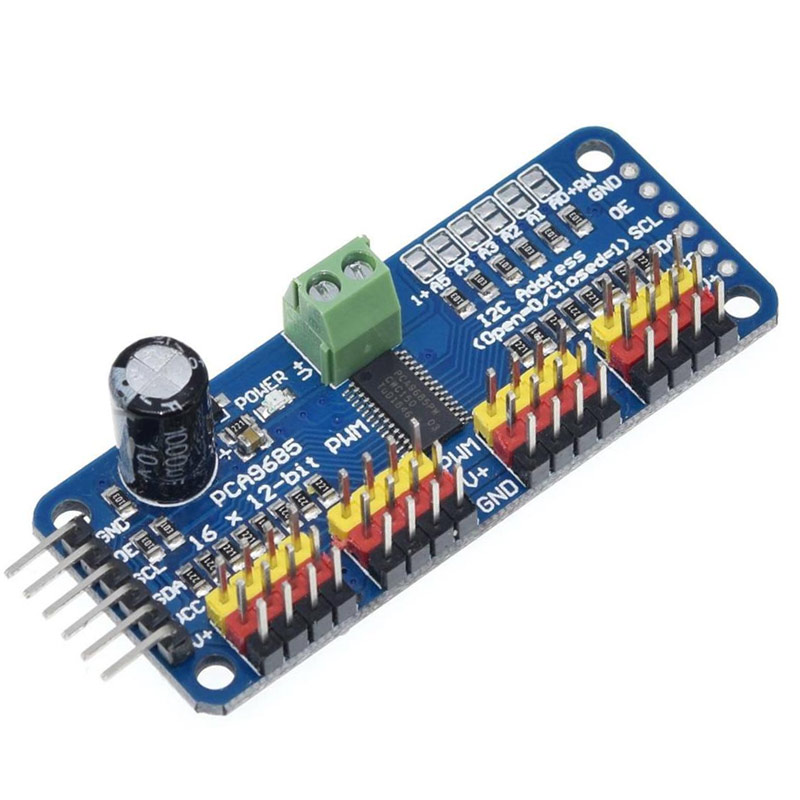



Pour contrôler 16 servo-moteurs maroc via le bus I2C, vous pouvez utiliser un pilote I2C spécialement conçu pour cette tâche. L’un des pilotes couramment utilisés est le PCA9685, un circuit intégré qui prend en charge la communication I2C et offre des sorties PWM (modulation de largeur d’impulsion) pour le contrôle des servo-moteurs. Voici comment vous pouvez utiliser le PCA9685 pour contrôler 16 servo-moteurs :
- Connexion du PCA9685 :
Connectez le PCA9685 à votre microcontrôleur ou à votre carte de développement. Les broches SDA (ligne de données) et SCL (ligne d’horloge) du PCA9685 doivent être connectées aux broches correspondantes du microcontrôleur. Assurez-vous de relier également les broches d’alimentation appropriées (VCC et GND). - Alimentation des servo-moteurs :
Les servo-moteurs nécessitent une alimentation distincte pour leur fonctionnement. Assurez-vous de connecter l’alimentation appropriée (généralement de 5V) aux broches d’alimentation du PCA9685 et aux servo-moteurs eux-mêmes. Veillez à respecter les spécifications de courant nécessaires pour alimenter les 16 servo-moteurs simultanément. - Configuration du PCA9685 :
Utilisez les fonctions disponibles dans la bibliothèque ou le framework de programmation que vous utilisez pour communiquer avec le PCA9685 via le bus I2C. Vous devrez configurer les registres du PCA9685 pour définir les paramètres des sorties PWM pour chaque servo-moteur. Cela peut inclure la fréquence de la PWM, les valeurs de rapport cyclique, etc. - Contrôle des servo-moteurs :
Une fois le PCA9685 configuré, vous pouvez envoyer des commandes pour contrôler les servo-moteurs individuellement. Vous pouvez spécifier la valeur de rapport cyclique souhaitée pour chaque servo-moteur, ce qui déterminera la position ou l’angle du servo-moteur. - Programmation et logique de contrôle :
Vous devrez écrire le code approprié dans votre application pour interagir avec le PCA9685 et envoyer les commandes de contrôle nécessaires. Cela peut impliquer l’utilisation de bibliothèques ou de fonctions spécifiques fournies par le fabricant du PCA9685 ou adaptées à votre environnement de programmation.
Il est important de consulter la documentation spécifique du PCA9685 et de la bibliothèque ou du framework que vous utilisez pour obtenir des détails précis sur la configuration et la programmation. Cela vous guidera dans l’utilisation correcte du pilote I2C pour contrôler les 16 servo-moteurs.