


Le capteur d’obstacle infrarouge FC-51 est un module électronique souvent utilisé avec Arduino pour détecter la présence d’obstacles dans son champ de vision. Voici quelques informations sur l’utilisation de ce capteur avec Arduino :
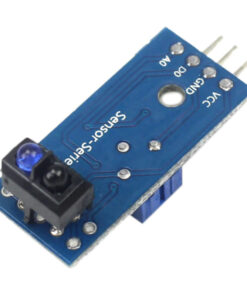
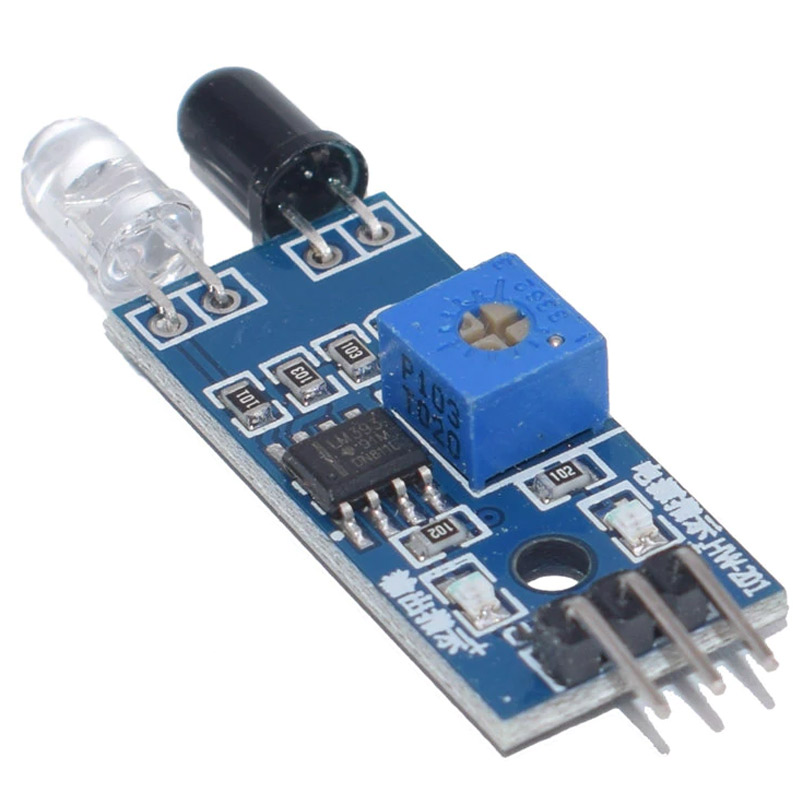
- Principe de fonctionnement : Le capteur d’obstacle infrarouge FC-51 utilise une paire d’émetteur-récepteur infrarouge pour détecter les obstacles. L’émetteur envoie un faisceau infrarouge, et si cet infrarouge est réfléchi par un obstacle, le récepteur détecte le signal réfléchi.
- Connexion physique : Le capteur d’obstacle FC-51 dispose généralement de trois broches : VCC (alimentation), GND (masse) et OUT (sortie). Vous pouvez connecter la broche VCC à la sortie 5V d’@rduino, la broche GND à la masse (GND) d’@rduino et la broche OUT à une broche numérique de votre choix sur @rduino.
- Programmation avec Arduino : Pour utiliser le capteur d’obstacle FC-51 avec Arduino, vous pouvez lire la valeur de la broche OUT à l’aide de la fonction digitalRead(). La valeur lue sera HIGH (1) si aucun obstacle n’est détecté, et LOW (0) si un obstacle est détecté.
- Calibration : Avant d’utiliser le capteur d’obstacle, il est recommandé de le calibrer en mesurant les valeurs lues lorsque rien n’obstrue son champ de vision, et en ajustant les seuils en conséquence dans votre code @rduino.
- Utilisation : Avec les mesures du capteur d’obstacle, vous pouvez réaliser différentes actions en fonction de la détection d’obstacles. Par exemple, vous pouvez créer un système d’évitement d’obstacles pour un robot, activer une alarme en cas de proximité d’un objet, ou créer un système de détection de présence.
Il est important de noter que la distance de détection et la précision du capteur d’obstacle infrarouge FC-51 peuvent varier en fonction de la qualité du module et des conditions d’obstruction. Il est recommandé de tester et d’ajuster le capteur dans votre environnement spécifique pour obtenir des résultats précis.